

智己向小鹏发起攻擂
“智己2年,走完友商9年智驾路。”
在刚过去的“IM AD DAY智己汽车智能驾驶发布会”上,智己用这句颇有意味的话来总结自家目前在高阶智能驾驶领域的成就。
如果说这里用“X品牌”和“N品牌”指代两家新势力友商还算隐晦,那在介绍技术路线时多次公开提及小鹏汽车则能明显看出其中较量的意味。
这也不是智己第一次关注小鹏。早在6月30日,智己汽车联席CEO刘涛就在微博恭贺小鹏G6上市,同时表示自家更大·更快·更靓的智己LS6将在成都车展亮相。
一句“标杆就是用来超越的”,摆明了挑战小鹏的野心和信心。
智己LS6和小鹏G6分别为这两家企业最新技术的集大成者,虽然智己LS6还未正式亮相,但在发布会上,智己已经公布,LS6将搭载旗下最新的智驾和座舱技术。
而智己在前两天的发布会上,用“自动驾驶前的最后一战”作为主题,在智驾上全方位和小鹏来了一次对标。
首先智己汇报了IM AD智驾功能的落地情况:
智己宣布:2023年第四季度,智己IM AD将正式迈入城市NOA时代。
从上面这张图就能看出,智己这个智驾进程有多夸张,从2020年12月品牌成立,到跟进头部玩家的布局速度,智己只花了2年时间。
智己团队在2021年刚着手智驾方案搭建时,就选择了OneModel体系以及BEV、Transformer的技术落地。其实这时候就能看出智己在路线选择上更加重视视觉和数据算法。
先简单聊聊一台智能车帮忙驾驶的过程:
首先它需要了解道路规则,接下来需要训练面对其他道路参与者的能力。就如同人类在开车时脑海里会假设在某种环境中采取某操作后相应的后果,再选择最优策略。
智能车学习策略不仅可以通过采集真实行车数据,还有一个重要环节就是通过模型还原虚拟场景,一次次训练面对不同路况的数据,这就是我们人类司机所说的“经验”。
针对大量数据,智己落地OneModel技术来管理整个建模数据体系,通过建立核心指标的方式抓取有用信息并结构化,这样也有利于提高数据标注的速度和质量,方便自动化开发和进一步训练。
说起来似乎有些拗口,那我们来个比喻:当我们通过积累的方式掌握了一些纷繁杂乱的医疗知识,这时候我们看到了一个受伤的人躺在地上,我们只能从无序的记忆里找到相应措施,但这样效率比较慢。
而一旦我们通过语文、数学、物理、生物等类别的知识框架训练,我们就能迅速梳理出这里需要生物和物理(不使伤口受力的搬运方式)类的知识,OneModel其实就是为智能车的数据做梳理和深化。
再来看BEV+Transformer的技术路线:在特斯拉两年前第一次将这种算法形式引入到自动驾驶领域后,大模型视觉算法逐步成为主流,包括小鹏、理想、华为、大疆、地平线都在积极布局。
简单来说,由于各个传感器抓取的信息不同,例如摄像头抓取2D画面,毫米波雷达采集点云,甚至不同位置的传感器获取的信息表面看起来都大相径庭。
BEV则会提供空间将这些同一时刻下的信息融合起来,而Transformer神经网络会去计算重合部分输出完整的信息。
就像我们面对碎片,根据边缘色调和线条来拼凑出完整的拼图一样,BEV+Transformer就会将所有感知信息还原成完整的路况信息。
再通过不间断的工作将画面连续输出,这就达到了实时构建地图的效果,不仅辅助了正常行驶,还可以预测可视范围内其他交通参与者的轨迹,提升系统的实用性。
小鹏自然是其中的佼佼者,量产的BEV感知架构也是小鹏XNGP辅助驾驶系统的核心模块,前两天我们还体验到了无图的小鹏在北京市区的惊艳表现。
智己作为智驾领域的攻擂者,想要在短短两三年内追上小鹏多年的积累,显然需要做到更多。
图中数据为品牌官方公示
在今年4月,智己赶上了大模型潮流,联合Momenta发布了D.L.P人工智能模型,D.L.P 指的是deep learning Planning深度学习规划,其重心在于用数据来明确需求解决典型困难场景。
这是什么意思呢?按照开车的逻辑来说,我们应该红灯停绿灯行,遇加塞要避让,这是基于规则的基础上来开车。
但是例如在接近匝道口时什么距离变道更稳妥,前方有慢车该超车还是减速跟行,这无法给出标准答案。所以一段行程中可以规划出很多可行路径,但老司机就能掌握各种分寸开的更高效、舒适。
面对加塞选择的不同策略
所以规划本质是一个经验和搜索问题,在众多可行方案中选出最优解,练的越多就越能把控细节。
D.L.P 人工智能模型通过巨量的模拟车辆在各种场景下进行各种操作方式,积累车辆采取某规划路径后的通行效果数据,反哺到现实生活中的智驾功能运行。
智己还在DDLD和基于Occupancy占用网络的DDOD(数据驱动的障碍物感知算法)技术方案上下了大力气。这两项技术分别针对时下热门的“无图”和“视觉”。
DDLD核心解决的是高精地图的覆盖度和鲜度问题所导致的体验不连续,甚至容易产生的安全问题。通过实时感知,生成道路地标,输出给规控模块。
DDLD实测表现
最重要的是,通过DDLD,智己IM AD不需要依赖高精地图。
而Occupancy Network则是由特斯拉在2022CVPR上提出的技术,由于数据世界里不规则物体难以识别,那么将三维世界划分为一个网格单元,定义哪个单元被占用,哪个单元是空闲的,就可以用划分区域的方式将复杂场景中的不同物体区分开来,例如路面凸起的石块和车辆悬挂物。
还可以把当前场景下被遮挡的静止物体和动态物体也用体积块表示出来。通过占用网络,结合BEV模型,可以对路径规划有更多信息。
以上最新技术都将搭载于智己LS6这款车上,全系配备去高精地图的NOA能力,同时搭载“一键场景代驾”功能,可以实现一键泊车、一键贴边、一键循迹等功能。
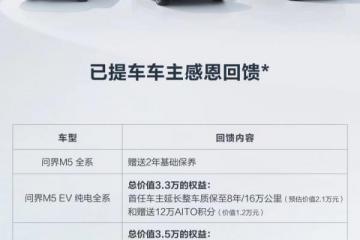
由于新车未亮相无法实际体验最新IM AD,在这里先和大家分享官方发布的成绩:IM AD的安全接管次数为0.36次/千公里,泊车成功率97%,车尾识别率99.4%;碰撞事故率0.6次/百万公里,安全性达到人驾的3.2倍。
有意思的是,这样的能力输出,并未基于强大的算力和丰富的硬件基础上。
智己的技术人员表示,智己IM AD是行业唯二兼容Xavier(低算力)、Orin(高算力)双智驾计算平台的自研玩家。
通过算法优化,在满足功能增长的前提下,算力需求降低90%。同时通过模型优化,模型运行效率提升500%;
仅使用单OrinX芯片和单颗激光雷达,即可实现全量城市场景及去高精地图化的NOA方案。
非激光雷达的全域视觉融合方案,仅依靠Xavier、OrinN等中低算力平台即可实现。
聊到这儿,我们不妨推测,未来智己会推出搭载基于低算力平台实现纯视觉智驾方案的车型,在芯片和激光雷达方面压低成本后,这样一款车的价格也会更亲民,也势必将肩负起智己内部走量的重任。
今年上海车展的时候,智己正式发布了“AI4M智能战略”,当时我在现场,刘涛几乎没怎么看提词器,一个人演讲了接近20分钟,不卡顿、没停滞。把软硬件架构、大规模智能算法和智能场景体验这三项智己智驾的地基讲得深入浅出。
那时刘涛埋下了一个彩蛋,他透露智己2023年下半年上市的新车,将以“智能化运动控制”和“视觉融合功能增强”为标志,竖起智己在智驾领域的一个标杆。
旁边一个非新能源领域的媒体同行问我:“智己是看上小鹏‘智驾一哥’的牌匾了吗?能行吗?”我笑着不置可否。
将在马上到来的成都车展亮相的LS6,或许就会给我们一个答案。
郑重声明:此文内容为本网站转载企业宣传资讯,目的在于传播更多信息,与本站立场无关。仅供读者参考,并请自行核实相关内容。
推荐
-
见证加冕时刻,2023IVISTA智能网联汽车挑战赛大奖各归其主
奖杯颁给优胜者,但荣誉属于每一位踏上赛道的参与者! 8月20日,顺利完成全部赛项的2023IVISTA智能网联汽车挑战赛,在重庆两江新区融合创新中心举行颁奖仪...2023-08-22 09:32 -
起亚成都车展阵容EV6上市/EV5同步预售
网易汽车8月17日报道日前从官方获悉,起亚EV6将于成都车展中启动上市,同时国产版EV5也将在车展中开启预售工作。起亚EV5定位纯电紧凑型SUV,整体外观方正硬...2023-08-19 12:11 -
奔驰CEO谈不打价格战:保持价格稳定、品牌价值才是关键
今年1月份,特斯拉首席执行官马斯克坦言,“我认为有很多人想买特斯拉,但买不起。” 在马斯克发表上述言论之时,特斯拉正在全球范围内掀起了一波又一波价格战,让福特...2023-08-19 11:54 -
官图曝光,吉利“极越01”诠释汽车机器人美学
·“极越”品牌成立,定位吉利控股旗下高端智能汽车机器人品牌,首款车型命名“极越01” ·吉利和百度强强联合,全面协同赋能极越汽车机器人品牌发展 极越定位高端...2023-08-19 10:40 -
罗姆计划扩大碳化硅芯片产能
盖世汽车讯据外媒报道,日本半导体制造商罗姆希望在2024年底启动其迄今为止最大的生产设施。为此,罗姆正在收购太阳能技术公司SolarFrontier在日本国富(...2023-08-15 09:53
最新
图文
-
德国统计局表示,今年第一季度进口电动汽车中,中国生产的汽车占比28.2%,排名第二。在进口国家中,中国超过了韩国。这比去...[详情]

-
初夏悄然而至,正是出游好时节。这不,正适合跟着斯柯达柯迪亚克、明锐Pro前往美丽鹭岛,开启一场海滨之旅。好时节又逢理想“...[详情]

-
行至巅峰,也向山海。5月25日,在世界最高峰——珠穆朗玛峰下,通过长安马自达官方直播间和浙江卫视频道和Z视介平台,“山系...[详情]

-
近日,北美年度风云车(简称NACTOY)公布了2023年度汽车名单。其中起亚纯电动汽车EV6荣获NACTOY评审团授予的...[详情]

-
对于汽车厂家来说,紧凑型SUV市场是必争之地。不管是中国品牌,还是合资对手,都将这块市场视为“一...[详情]

-
车评观察《车评社》前言:作为自主一线豪华品牌,红旗汽车在国内市场的环境可谓是强敌环伺,但即便如此...[详情]
-
回首2022年,新能源汽车市场可谓炙手可热。在这条快速成长的轨道上,各路车企纷纷抢滩登陆,在市场中抢占先机。伴随着竞争愈...[详情]
-
今日,极氪智能科技旗下全球首款原生纯电豪华MPV极氪009如期开启交付。首批用户在北京、上海、杭州、南京等城市的极氪交付...[详情]
